الکتروموتورها و ژنراتورها تجهیزاتی هستند با بهرهگیری از قوانین القای مغناطیسی و همچنین اثر میدان مغناطیسی روی هادیها وظایف مربوط به خود را انجام میدهند؛ با این تفاوت که ژنراتورها قادرند با بهره گیری از اصول فیزیکی مذکور، نیروی مکانیکی از نوع حرکتی را به جریان الکتریکی تبدیل نمایند در حالی که الکتروموتورها برای عملکردی دقیقاً مخالف آن طراحی شده است. به این ترتیب که الکتروموتورها میتوانند انرژی جریان الکتریکی را به حرکت مکانیکی تبدیل نمایند. با ما در تکه کابل تا انتهای این مطلب همراه باشید.
آشنایی با اجزای اصلی و شیوه پیکربندی الکتروموتور دورانی
ایده اولیه ساخت الکتروموتورها روی این اصل استوار است که با قرار گرفتن هادی حامل جریان الکتریسیته تحت اثر یک میدان مغناطیسی، نیرویی از جانب میدان مغناطیسی بر روی هادی اعمال میشود. از این نیرو میتوان برای ایجاد حرکت دوار و یا خطی استفاده نمود.
صرف نظر از اینکه الکتروموتورها دارای حرکت دوار است یا خطی، میبایست دارای دو بخش ثابت و متحرک باشد تا بتواند جریان برق را به نیروی مکانیکی-حرکتی تبدیل نماید. بخش ثابت که به آن ایستاتور گفته میشود در داخل بدنه موتور جای میگیرد و میدان مغناطیسی مورد نیاز را فراهم میکند. بخش متحرک یا روتور نیز درون استاتور قرار میگیرد. بسته با ویژگیهای موتور الکتریکی، هنگامیکه جریان AC یا DC متصل شود، روتور یا بخش متحرک که معمولاً شفت هم به آن متصل است تحت تأثیر میدان مغناطیسی در داخل استاتور و نیروی گشتاور ایجاد شده قرار گرفته و حول محور خود میچرخد.
باید توجه داشت که تنوع الکتروموتورها در صنایع و کابردهای مختلف بسیار زیاد است. تفاوتهای نمونههای مختلف موتور الکتریکی را میتوان در ویژگیهایی مانند جریانهای AC، DC، سه فاز، تک فاز و همچنین پیکربندیهای متفاوت مشاهده نمود. با این حال وجود برخی قطعات در بین همه مدلها مشترک میباشد.
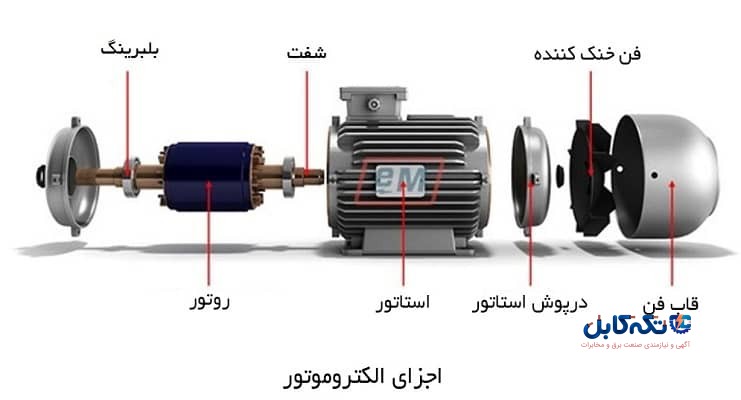
استاتور موتور الکتریکی
استاتور از قطعات فلزی (آلومینیوم یا آهن سبک) به هم پیوستهای تشکیل شده است. در محل تلاقی این قطعات با یکدیگر شکافهایی وجود دارد که سیم پیچهایی با هادی روکشدار در این شکافها قرار داده میشوند. نحوه جاسازی کویلها درون استاتور و شیوه اتصال آنها با یکدیگر در مدلهای مختلف الکتروموتور با یکدیگر فرق دارد، اما نکته مشترک در این است که پس از برقراری جریان برق در سیم پیچهای استاتور، نیروی مغناطیسی دورانی درون استاتور به وجود میآید.

روتور موتور الکتریکی
روتور نیز مانند استاتور ساختار یکپارچه ندارد بلکه از مجموعه قطعات فلزی (معمولاً) فولادی به هم پیوسته تشکیل میشود. در درون روتور هادیهایی از جنس مس یا آلومینیوم قرار داده شده است که در درون آنها همواره جریان اتصال کوتاه برقرار است. تأثیر میدان مغناطیسی استاتور بر هادیهای دارای جریان در روتور، نیروی گشتاور مورد نیاز را به وجود میآورد. بعضی از روتورها آهنربای دائمی دارند و هادیهای الکتریکی در بخش متحرک آنها جای داده میشوند.

فن خنک کننده موتور الکتریکی
دو عاملی که بیشترین اثر تخریبی را روی الکتروموتورها دارند، افزایش دما و رطوبت هستند. به همین منظور در انتهای شفت خروجی از روتور یک فن خنک کننده نصب میشود تا همزمان با کارکرد موتور الکتریکی شروع به گردش نماید.
بلبرینگ یا یاتاقان در الکتروموتور
با ایجاد یک تکیه گاه مطمئن، به شفت روتور اجازه میدهد بدون نوسان و انحراف گردش کند. علاوه بر این به کمک بلبرینگ، فشار و اضافه بار ایجاد شده روی شفت به حالت تعلیق در میآید.
سوئیچ تغییر دهنده جهت برق یا کموتاتور
در اغلب الکتروموتورهای با حریان DC و برخی از انواع AC، از کموتاتور برای جابهجایی رفت و برگشت جریان ورودی استفاده میشود. در صورت عدم وجود چنین دورانی موتور متوقف میشود.
طبقه بندی موتورهای الکتریکی بر حسب نوع جریان مصرفی
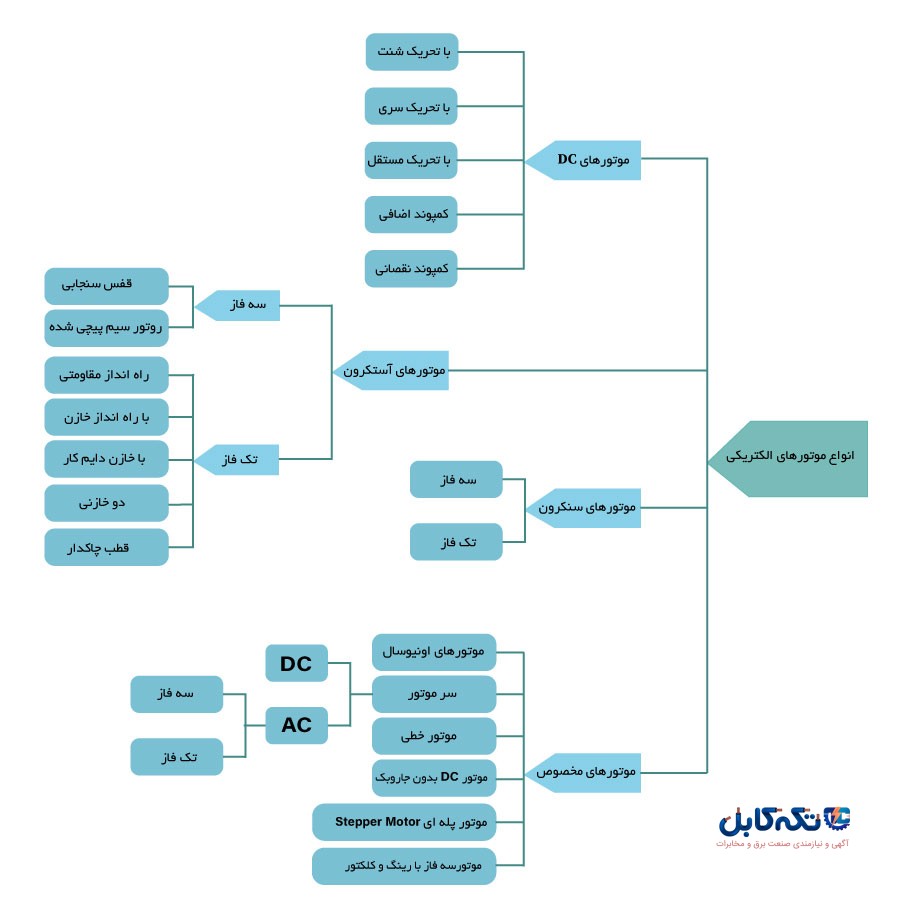
الف) موتورهای برق با جریان DC یا مستقیم
در این نوع الکتروموتورها، بخش استاتور از آهنربای دائمی و روتور از آهنربای الکتریکی تشکیل شدهاند. پس از اتصال جریان برق، سوئیچ کموتاتور برای جلوگیری از توقف موتور الکتریکی، در هر سیکل، جریان الکتریکی را دو مرتبه معکوس میکند تا روتور و استاتور به صورت پیوسته یکدگر را جذب و دفع نمایند. انواع الکتروموتورهای جریان DC را در ادامه ملاحظه میفرمایید.
- مدل DC با تحریک شنت (Shaunt)
بیشترین کاربرد مدل DC با تحریک شنت در دمندههای صنعتی، هواکشها و سیستمهای تهویه هوا است. آنها را نمیتوان زیر بارهای سنگین راهاندازی نمود، زیرا امکان آسیب دیدن روتور و به طور کلی موتور الکتریکی بسیار بالاست.
- مدل DC با تحریک سری (Series)
بیشترین کاربرد این نوع در صنایعی است که به گشتاور راهاندازی بالایی احتیاج دارند. بنابراین استفاده از آنها در کاربردهای جرثقیل، بالابر هیدرولیک، پرسهای ضربهای و آسانسور بسیار رایج است.
- مدل DC مرکب (Compound)
این مدل جریان DC مرکب با ادغام ویژگیهای مربوط به دو مورد قبل به دست میآیند. با این حال دسته از موتورهای الکتریکی را میتوان بر حسب ویژگیهای کارکردی و ساختاری به دو گروه مجزا تقسیم نمود: الکتروموتور DC کمپوند اضافی و این نوع DC کمپوند نقصانی. الکتروموتورهای کمپوند اضافی در صنایعی استفاده میشوند که به گشتاور راهاندازی بالا احتیاج دارند، اما از سوی دیگر نیاز است تا با برداشتن بار، موتور غیر قابل مهار نشود و دور آن خیلی بالا نرود (مانند ماشینهای تراش). الکتروموتورهای کمپوند نقصانی نیز در مواردی کاربرد دارند که تأمین سرعت ثابت، هدف اصلی پروژه باشد (تجهیزات آزمایشگاهی).
ب) موتورهای برق با جریان AC یا متناوب
رایجترین انواع الکتروموتورها که در کاربردهای صنعتی و خانگی مورد استفاده قرار میگیرند با جریان برق AC کار میکنند. در این موتورهای الکتریکی به جای آهنربای دائمی از ساختار سیم پیچ الکتریکی در روتور و استاتور استفاده میشود. موتورهای برق با جریان AC طراحی بسیار ساده و قابل اطمینانی دارند و هزینههای راهاندازی، نصب و نگهداری آنها بسیار پایین میباشد. علاوه بر این، با توجه به نوع برق مصرفی، میتوان آنها را به راحتی به منابع برق شهری متصل نمود. این نوع الکتروموتورها را میتوان به دو گروه عمده تقسیم نمود.
- الکتروموتور AC سنکرون (Synchronous)
- الکتروموتور AC آسنکرون (Asynchronous)
این موتورهای الکتریکی در برابر نوسانات جریان برق حساسیت ندارند و میتوانند به طور مستقیم با ولتاژ زیاد کار کنند. بازدهی بالا و ضریب قدرت مناسب هم از دیگر ویژگیهای الکتروموتورهای جریان برق AC است. الکتروموتورهای سنکرون به دلیل سرعت ثابتی که ارائه میکنند در مواردی مانند ساعت الکتریکی بیشترین کاربرد را دارد. برای کارکردهایی که به افزایش یا کاهش سرعت نیاز باشد، میتوان از الکتروموتورهای آسنکرون استفاده نمود.
سخن پایانی
ما در این مطلب از تکه کابل درباره الکتروموتورها صحبت کردیم. لطفا نظرات و تجربیات خود را در این باره با ما و مخاطبان عزیزمان در قسمت دیدگاهها به اشتراک بگذارید.
3001 بازدید فروشگاه ها
فروشگاه ها





